
Practical Arduino C
Chapter 7: Extras
Page 106
Page 107 and 108
void setup() {
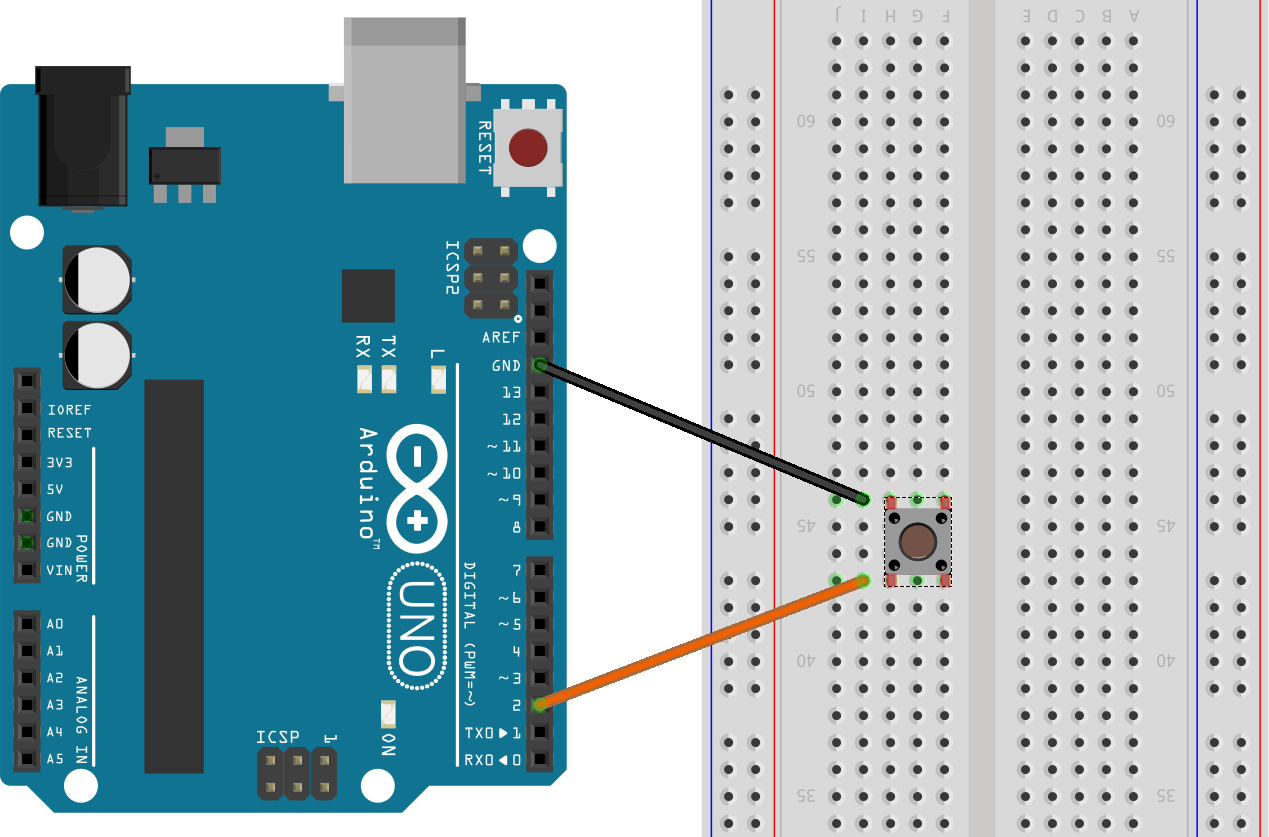
pinMode(2, INPUT_PULLUP); // pin 2 for ext interrupt 0
pinMode(LED_BUILTIN, OUTPUT);
cli(); // disable interrupts
EIFR |= (1 << INTF0); // clear any existing flags
EIMSK |= (1 << INT0); // Enable external interrupt INT0
EICRA |= (1 << ISC01); // Trigger request on falling edge
sei(); // re-enable interrupts
}
ISR(INT0_vect)
{
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1); // Toggle
//LED
}
const byte intPin = 2;
void setup() {
pinMode(intPin, INPUT_PULLUP); // pullup resistor enabled
pinMode(LED_BUILTIN, OUTPUT);
noInterrupts();
attachInterrupt(digitalPinToInterrupt(intPin), intHandler, FALLING);
interrupts();
}
void intHandler() {
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1); // Toggle LED
}
For a detailed explanation of switch bounce take a look at All About Circuits
Page 110
const byte intPin = 4;
void setup() {
pinMode(intPin, INPUT_PULLUP);
pinMode(LED_BUILTIN, OUTPUT);
noInterrupts();
PCMSK2 |= (1 << PCINT20); // set interrupt for pin D4
PCIFR |= (1 << PCIF2); // clear any outstanding interrupt flags
PCICR |= (1 << PCIE2); // enable pin change interrupts for this port
interrupts();
}
ISR(PCINT2_vect) {
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1); // Toggle LED
}
Page 110
const byte intPin = 4;
volatile byte flag = 0;
byte lastFlag = flag;
void setup() {
Serial.begin(115200);
pinMode(intPin, INPUT_PULLUP);
pinMode(LED_BUILTIN, OUTPUT);
noInterrupts();
PCMSK2 |= (1 << PCINT20); // set interrupt for pin D4
PCIFR |= (1 << PCIF2); // clear any outstanding interrupt flags
PCICR |= (1 << PCIE2); // enable pin change interrupts for this port
interrupts();
}
ISR(PCINT2_vect) {
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1); // Toggle LED
flag = (digitalRead(intPin) == LOW) ? 1 : 2;
}
void loop() {
if(lastFlag != flag) {
Serial.println((flag == 1) ? "LOW" : "HIGH");
lastFlag = flag;
}
}
Page 112
const byte intPin = 4;
void setup() {
Serial.begin(115200);
Serial.println("Send '1' to interrupt");
pinMode(intPin, OUTPUT); // note pin set for output
digitalWrite(intPin, HIGH); // and to an initial state
pinMode(LED_BUILTIN, OUTPUT);
noInterrupts();
PCMSK2 |= (1 << PCINT20); // set interrupt for pin D4
PCIFR |= (1 << PCIF2); // clear any outstanding interrupt flags
PCICR |= (1 << PCIE2); // enable pin change interrupts for this port
interrupts();
}
ISR(PCINT2_vect) {
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1); // Toggle LED
}
void loop() {
if (Serial.available() > 0) {
char nChar = Serial.read();
if(nChar == '1') {
Serial.println("Going LOW");
digitalWrite(intPin, LOW); // trigger the PC interrupt
unsigned long tmr = millis() + 1000;
while (millis() < tmr) {
// wait a second
}
Serial.println("Going HIGH");
digitalWrite(intPin, HIGH); // trigger the interrupt again
}
}
}
Page 114
#include <util/atomic.h>
volatile int wdiCount = 0;
void setup() {
Serial.begin(115200);
Serial.println("Program Started");
noInterrupts();
wdt_reset(); // watchdog timer reset
//now code to set up WDT interrupt
WDTCSR = (1<<WDCE)|(1<<WDE);
//set timer counter with 8s ish prescaller
WDTCSR = (1<<WDIE)|(1<<WDP0)|(1<<WDP3);
interrupts();
}
// ISR for watchdog interrupt
ISR(WDT_vect)
{
wdiCount++; // increment a counter for fun
}
void loop() {
int wdCount;
Serial.flush(); // just to be sure
gotoSleep();
ATOMIC_BLOCK(ATOMIC_RESTORESTATE){
wdCount = wdiCount;
}
Serial.print("Wake up number: ");
Serial.println(wdCount);
}
// section on sleep modes coming up later in this chapter
void gotoSleep()
{
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // full sleep mode
sleep_enable(); // set SE bit
sleep_mode(); // board starts sleep here
// ** code resumes here on wake **
sleep_disable();
}
Page 115
#include <avr/wdt.h>
#include <avr/sleep.h>
#include <avr/wdt.h>
void setup() {
Serial.begin(115200);
Serial.println("Program Started/Restarted");
pinMode(LED_BUILTIN, OUTPUT);
wdt_enable(WDTO_2S); // fire watchdog interrupt every 2 seconds
}
void loop() {
for(unsigned int i = 0; ; i++){
wdt_reset(); // restart the interrupt timer
digitalWrite(LED_BUILTIN, HIGH);
delay(i * 250);
digitalWrite(LED_BUILTIN, LOW);
delay(500);
}
}
Page 116
#include "MsTimer2.h"
#include <util/atomic.h>
volatile unsigned int volVal = 0xFF00;
bool swtch = true;
void setup() {
Serial.begin(115200);
MsTimer2::set(100, timeInterrupt); // 100ms period
MsTimer2::start();
}
void timeInterrupt()
{
//ISR just toggles the value of test, lowbyte 0x00FF or highbyte 0xFF00
volVal = (swtch)? 0x00FF : 0xFF00;
swtch = !swtch;
}
void loop() {
unsigned int loopVal;
//ATOMIC_BLOCK(ATOMIC_RESTORESTATE)
{
loopVal = volVal;
}
//Test value of loopVal should only ever be 0x00FF or 0xFF00
if(loopVal != 0xFF00 && loopVal != 0x00FF)
{
//local value incorrect due to non-atomic access of volVal
Serial.println(loopVal, HEX);
}
}
Page 118
#include <avr/power.h>
#include <avr/sleep.h>
void setup() {
Serial.begin(115200);
Serial.println("Send a char to wake the board");
delay(1000); //Serial activity is asynchronous so wait allows activity
//to cease
gotoSleep();
}
void gotoSleep()
{
set_sleep_mode(SLEEP_MODE_IDLE); // gentle sleep mode
sleep_enable(); // set SE bit
// set the power saving extras
power_adc_disable();
power_spi_disable();
power_timer0_disable();
power_timer1_disable();
power_timer2_disable();
power_twi_disable();
sleep_mode(); // put the board to sleep
// code resumes here on wake
sleep_disable();
power_all_enable();
Serial.println("Now Awake!");
}
Serial interface
If you take a look at the documentation for the Serial object you will see a function called serialEvent(). The documentation says thet serialEvent() is called when data is available. You might get the impression that this is an interrupt service routine (ISR). It is not unfortunately. What actually happens under the hood is that if you implement a function named serialEvent() in your code the pre-compile process will add a "hidden" line to the bottom of the loop() function*. This line reads:if (serialEventRun) serialEventRun();
The variable serialEventRun will hold a pointer to your serialEvent() function if there is some waiting serial data.
Where your code is regularly running through the loop() function then that is a "just good enough" implementation as the function in question will be regularly called and you can add code to that function to check for and read available data from the Serial buffer.
Things are not quite so good if your code is running a lengthy process outside of the loop function but you would still like to know about data arriving over the Serial link.
The most obvious solution would be to insert that same line into that long running function's code so that a check can be made from time to time. Not quite an ISR but maybe still just good enough.
* OK that is a convenient way of thinking about it. The actual implementation is closer to what follows:
int main(void)
{
init();
setup();
for (;;) {
loop();
if (serialEventRun) serialEventRun();
}
return 0;
}