Page 119
Page 120
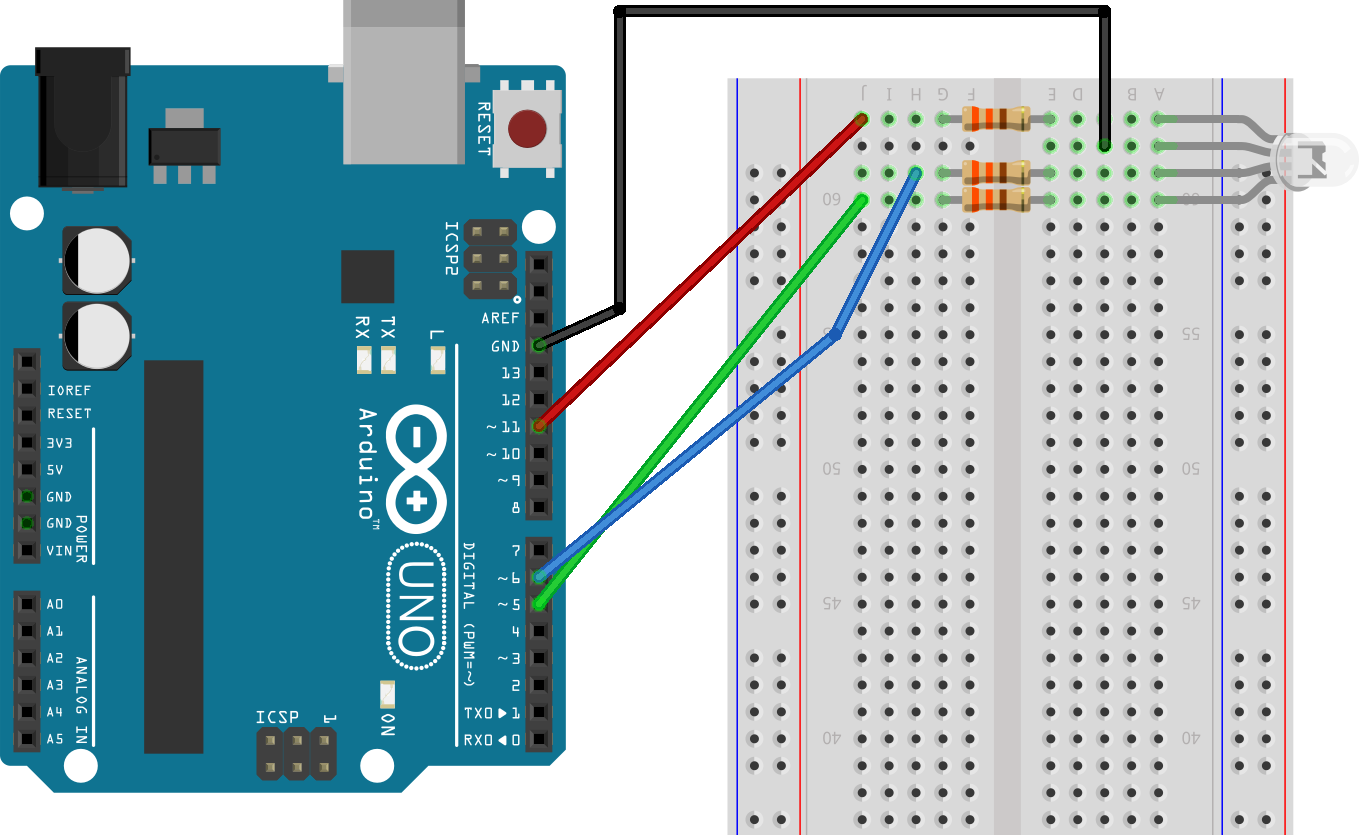
const int RED_PIN = 11;
const int GREEN_PIN = 5;
const int BLUE_PIN = 6;
void setup() {
pinMode(RED_PIN, OUTPUT);
pinMode(GREEN_PIN, OUTPUT);
pinMode(BLUE_PIN, OUTPUT);
}
void loop() {
setColour(255, 0, 0); // red
//setColour(0, 255, 0); // green
//setColour(0, 0, 255); // blue
//setColour(255,255,255); // white (well blueish white)
delay(1000);
setColour(0, 0, 0); //off
delay(1000);
}
void setColour(byte red, byte green, byte blue)
{
analogWrite(RED_PIN, red);
analogWrite(GREEN_PIN, green);
analogWrite(BLUE_PIN, blue);
}
Page 122
const int DIG_RED_PIN = 7;
const int MSECS_ON = 250; // 25% of 1,000
const int MS_SEC = 1000;
void setup() {
pinMode(DIG_RED_PIN, OUTPUT);
}
void loop() {
digitalWrite(DIG_RED_PIN, HIGH);
delayMicroseconds(MSECS_ON);
digitalWrite(DIG_RED_PIN, LOW);
delayMicroseconds(MS_SEC - MSECS_ON);
}
Page 123
void setup() {
pinMode(LED_BUILTIN, OUTPUT); // setup the LED pin
noInterrupts(); // disable all interrupts
TCCR1A = 0; // Timer control register
TCCR1B = 0;
// bit twiddling to set signal division and mode
TCNT1 = 3036; // Set counter to start value 65536 - (16Mhz / 256)
TCCR1B |= (1 << CS12); // 256 prescaler
TIMSK1 |= (1 << TOIE1); // set timer overflow interrupt
interrupts(); // re-enable interrupts
}
ISR(TIMER1_OVF_vect){
TCNT1 = 3036; // reset timer for 1 sec blink then toggle LED
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1);
}
void loop() {
}
Page 124
void setup() {
pinMode(LED_BUILTIN, OUTPUT); // setup the LED pin
noInterrupts(); // disable all interrupts
TCCR1A = 0; // Timer control register
TCCR1B = 0;
TCNT1 = 0; // Zero timer counter register for Timer1
// now the register bit twiddling
OCR1A = 62500; // Set the compare match register for 1Hz
TCCR1B |= (1 << WGM12); // CTC mode
TCCR1B |= (1 << CS12); // 256 prescaler
TIMSK1 |= (1 << OCIE1A); // set timer compare interrupt
interrupts(); // re-enable all interrupts
}
// An output compare interrupt on Timer1 calls this ISR
ISR(TIMER1_COMPA_vect){ // timer compare interrupt service routine
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1); // toggle LED
}
void loop() {
}
Page 125
void setup() {
pinMode(LED_BUILTIN, OUTPUT); // setup the LED pin
noInterrupts(); // disable all interrupts
TCCR2A = 0; // Timer control register
TCCR2B = 0;
TCNT2 = 0; // Set counter to 0
OCR2A = 240; //Compare match register
TCCR2A |= (1 << WGM21); // CTC Mode
TCCR2B |= (1 << CS22) | (1 << CS20) | (1 << CS21); // max prescaler
TIMSK2 |= (1 << OCIE2A); // set timer compare interrupt
interrupts(); // re-enable interrupts
}
ISR(TIMER2_COMPA_vect){
digitalWrite(LED_BUILTIN, digitalRead(LED_BUILTIN) ^ 1);
}
